Contents
Called Functions
VL11: Ausgleichsrechnung
clear all; close all;
t = (0:0.01:3)';
y = 4 + cos(t) - 0.5*sin(t)+0.2*rand(size(t));
plot(t,y,'r.')
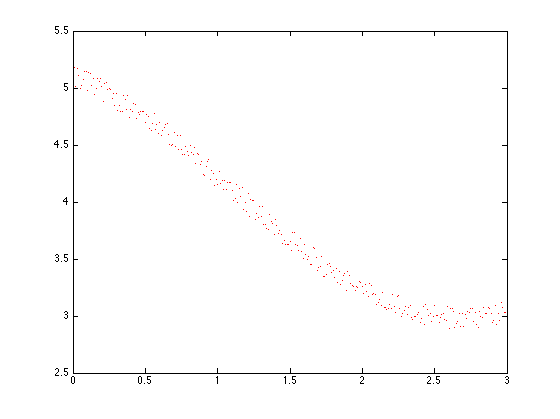
Ziel: Bestimme eine Kurve, die diese Daten gut approximiert.
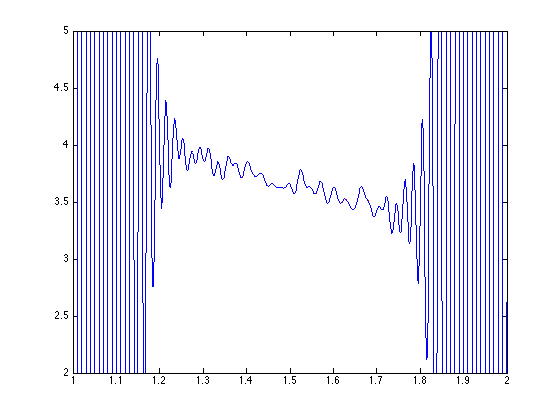
1. Versuch: Polynominterpolation
close all; tt = 0:0.001:3; yy = polyinterp(t,y,tt); plot(t,y,'r.') hold on plot(tt,yy) axis([1 2 2 5]) hold off
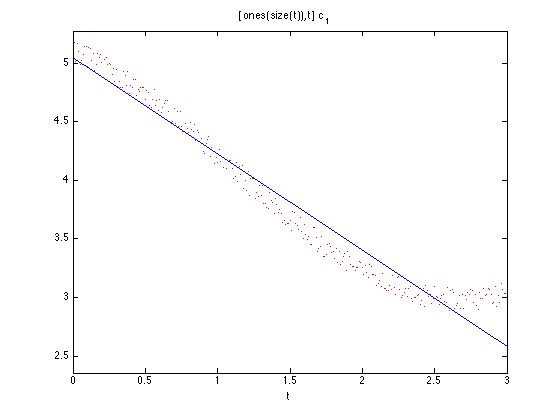
2. Versuch: Berechne Ausgleichsgrade
X1 = [ones(size(t)) t]; c1 = X1\y; f1 = @(t) [ones(size(t)) t]*c1; close all plot(t,y,'r.'); hold on ezplot(f1,[0,3])
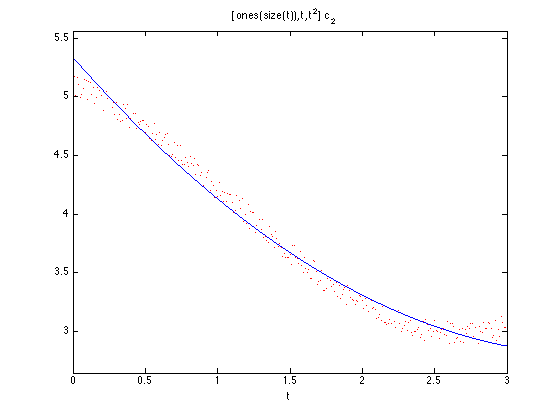
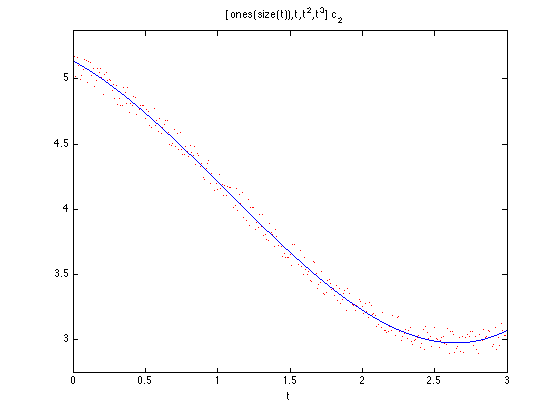
3. Versuch: Berechne Polynom
X2 = [ones(size(t)) t t.^2]; c2 = X2\y; f2 = @(t) [ones(size(t)) t t.^2]*c2; close all plot(t,y,'r.'); hold on ezplot(f2,[0,3])
X2 = [ones(size(t)) t t.^2 t.^3]; c2 = X2\y; f2 = @(t) [ones(size(t)) t t.^2 t.^3]*c2; close all plot(t,y,'r.'); hold on ezplot(f2,[0,3])
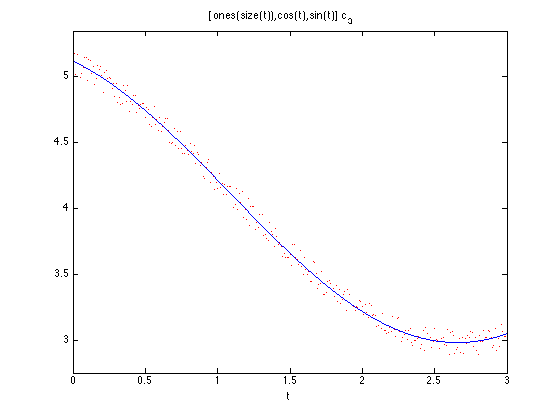
4. Versuch: Benutze die Basis 1, sin(t), cos(t):
X3 = [ones(size(t)) cos(t) sin(t)]; c3 = X3\y; f = @(t) [ones(size(t)) cos(t) sin(t)]*c3; close all plot(t,y,'r.'); hold on; ezplot(f,[0 3])
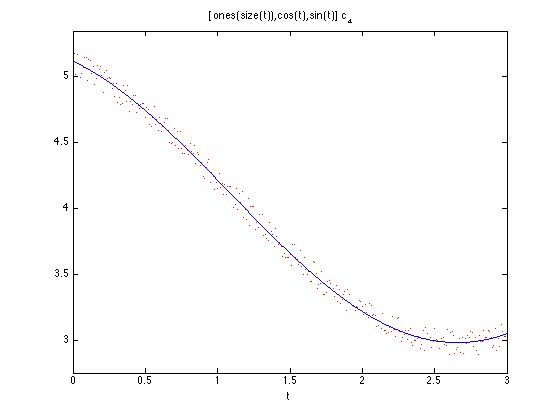
Verwende QR-Zerlegung
X4 = [ones(size(t)) cos(t) sin(t)]; [Q,R]=qr(X4,0); c4 = R\(Q'*y); f = @(t) [ones(size(t)) cos(t) sin(t)]*c4; close all; plot(t,y,'r.'); hold on; ezplot(f,[0,3])
Veranschaulichung der Funktionsweise von qr(X,y)
t = (0:0.25:1)'; y = 4 + cos(t) - 0.5*sin(t)+0.2*rand(size(t)); X = [ones(size(t)) cos(t) sin(t)]; qrsteps(X,y)
A =
1.0000 1.0000 0
1.0000 0.9689 0.2474
1.0000 0.8776 0.4794
1.0000 0.7317 0.6816
1.0000 0.5403 0.8415
b =
5.1364
4.8537
4.6522
4.4952
4.1389
A =
-2.2361 -1.8418 -1.0062
0 0.0907 -0.0635
0 -0.0006 0.1685
0 -0.1465 0.3707
0 -0.3379 0.5305
b =
-10.4095
0.0497
-0.1518
-0.3087
-0.6650
A =
-2.2361 -1.8418 -1.0062
0 -0.3793 0.6313
0 0 0.1676
0 0 0.1542
0 0 0.0311
b =
-10.4095
-0.7238
-0.1508
-0.0676
-0.1089
A =
-2.2361 -1.8418 -1.0062
0 -0.3793 0.6313
0 0 -0.2298
0 0 0
0 0 0
b =
-10.4095
-0.7238
0.1701
0.0568
-0.0838
ans =
-2.2361 -1.8418 -1.0062
0 -0.3793 0.6313
0 0 -0.2298
0 0 0
0 0 0